工作
2016年7月24日 11:44 AM | 投稿者名: treasure
引き続き、ホイホイ基板の製作方法を備忘録的に書いていきます。

べニア板と角材が切り出せたら、接着工程です。で、その前準備として、角材接着位置と、釘を打つ位置を罫書いておきます。表面からは、接着時にずれ止めの釘を打ちますので、その位置を罫書きます。まぁ打った釘には、ずれ止の意味しかありませんので、#70用のスパイクを使っています。ずれ止めですから、接着後は抜いてしまいます。ですから、鉄釘でも問題ありません。
裏面には、べニア板の端面と面一にならない箇所における、角材の端面位置を罫書いておきます。接着の際には、面一になる箇所は、直角ブロックで相互位置を決め、そうでない箇所は罫書き線に合わせることによって位置決めをします。

これが、接着に使用する工具と接着剤です。レールと平行となる縦通材の接着には、接着から圧着まで、時間的余裕が欲しい(圧着後に硬化して貰えると、反りが修正されますので…)ので、白ボンド(ボンド木工用)を、レールと直角になる肋材の接着には、初期接着力の強い黄ボンド(Titebond)を使用しています。縦通材の反り修正は、今回作っている100 mmLホイホイでは余り考えることはないかと思いますが、450 mmLになると、べニア板と角材が微妙に反っていることがありますので、その辺を考えて使い分けをしています。
オートポンチ類似の工具は、同じ構造で簡単に釘打ちをするためのもので、ずれ止めの釘として打つ#70用スパイクの頭部を、べニア表面まで沈めることに使用します。NTドレッサーは、肋材と表面保護角材の長さ調整に使用します。
カテゴリー:ホイホイ・MTCC規格モジュール, 工作, 江東電気軌道(KDK) |
コメント(0)
2016年7月14日 9:21 PM | 投稿者名: treasure
一ヶ月半、公私とも多忙でご無沙汰しておりました。当然、プロジェクトは全然進行していないのですが、それはそれ!ということで、前々回に引き続き、ホイホイ基板の製作方法を備忘録的に書いていきます。

べニア板が切り出せたら、次は下面に貼る角材の切り出しです。弊社では、PROXXONのミニカッティングソウを使用して切り出しています。角材を直角で切断する分には不自由しないのですが、角度をつけての切断には少々力不足です(全部切断するにはストロークがやや、不足です)。しかし全部、手で切り出すのよりははるかにまし、ということで、ピラニアソーを併用して切り出しています。
さて、ミニカッティングソウの写真をみてお解りの通り、切断角度は45°~90°の範囲で調整することができます。ということは… ちゃんと調整しないと、直角に切断できない、ということです。
で、調整方法として弊社では…
1.機械の目盛りや罫書き参考に、直角らしき処に合わせる。
2.適当な角材等を試しに切断してみる。
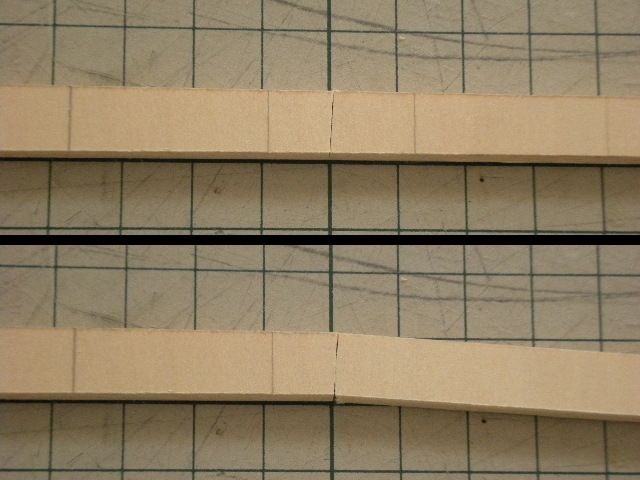
3.切断した角材等の片方を裏返して突き合わせてみる。
4.一直線にならなければ、直角からズレているので修正する。
5.2~4を、裏返しで突き合わせても直線になるまで繰り返す。
という方法で直角を出しています。ちなみに、45°に調整する時は、「裏返して突き合わせると90°」になる様に調整します。

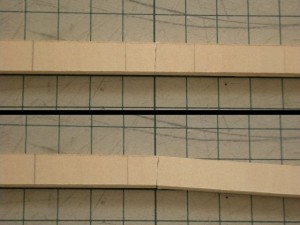
今回は直角切断のみでしたし、通常は10×20 mm角材だけを使用している処を、廃材使用ということから、10×10 mm角材で代用したりしましたので、比較的楽に切り出せました。手間を省くために、両サイドに貼る路面保護用の3×3 mm角材も、ここで切り出してしまいます。
で、写真が、切り出し結果です。
カテゴリー:ホイホイ・MTCC規格モジュール, 工作, 江東電気軌道(KDK) |
コメント(0)
2016年5月31日 7:27 AM | 投稿者名: treasure
5月29日に、「中央区立日本橋社会教育会館」において、工作会を開催しました。
今回は、「ホイホイを整備しよう」という御題で実施しました。

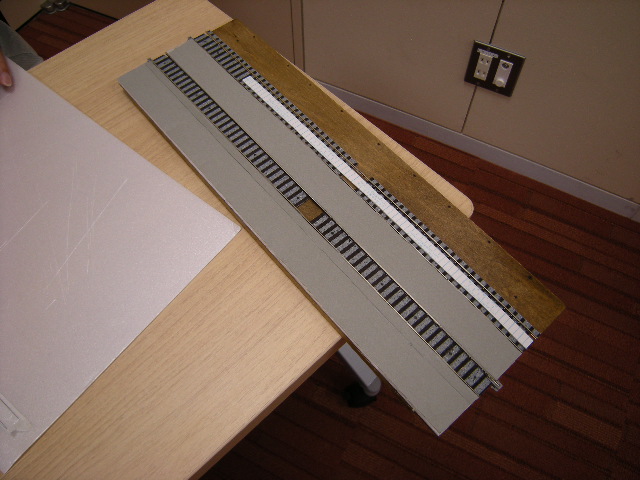
弊社のプロジェクトです。製作方法を連載している100 mmL直線ホイホイの台枠は既に完成していますので、それと150 mmL直線ホイホイに、軌框を敷設しました。100 mmL直線ホイホイの軌框は、廃材を遣り繰りして切り継いだので、中々手間がかかりました。残るは300 mmLと150 mmLです。前回の進捗状況報告から進んだのは、これだけです。

Yさんのプロジェクトです。450 mmLホイホイの複線間隔確認と、舗装工事です。複線間隔は無事、合致していることが確認されました。第一作なので、中々苦労されている様子です。

こちらは京阪700のプラキット組立です。如何にして動力化するか、が課題の様です。
カテゴリー:クラブ行事報告, ホイホイ・MTCC規格モジュール, 工作, 江東電気軌道(KDK) |
コメント(0)
2016年5月19日 9:19 PM | 投稿者名: treasure
ホイホイ基板の製作方法を備忘録的に書いていきます。

基板となるべニア板を規定の寸法に切り出せたら、次はユニジョイナーのジョイント部を収める切り欠きを作ります。
切り欠きを作る方法として、弊社では…
① ホイホイ端面から垂直(=レールと平行)に糸鋸で切れ目を入れ…
② その根本(=枕木と平行)を鑿状の刃物で切断する。
という方法を用いています。

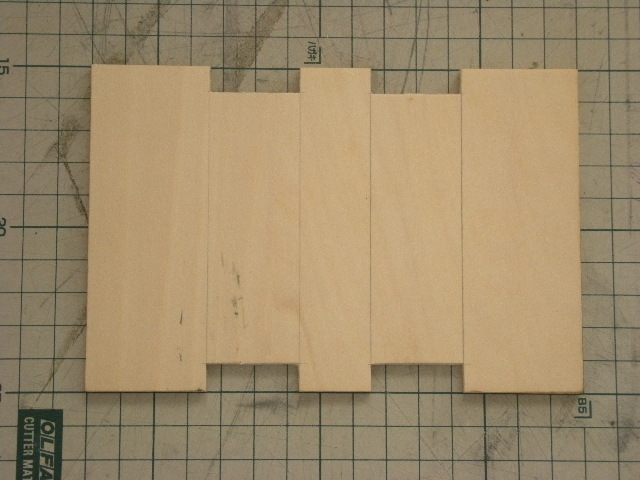
一箇所、切り欠いた状況です。まぁ、ここで書いた方法が正解ということはなく、所有している工具等で正解は異なってくるでしょう。例えば、ここに写っているパネルカッターがない状況では、②の工程も糸鋸で切ってしまうのが正解かと思います。
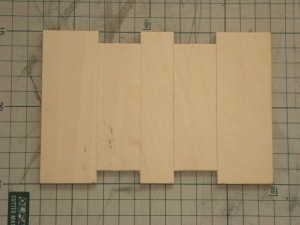
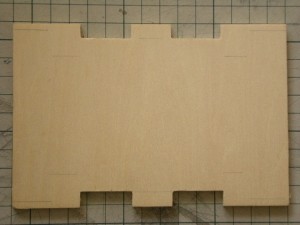
四箇所全てに切り欠きを作りました。切り欠きの奥行(=8 mm)は少々過大なので問題ないのですが、幅は28 mmと、ジョイント部を収めるのに必要な28.5 mmより狭くなっています。では何時、この調整をするのかということが問題になってきますが、色々試した結果として、全体にニスを塗って、固めた後が適当な模様です。生地のまま鑢を掛けますと、シナべニア板の表面に貼られた薄板が剥がれてくる傾向があります。
カテゴリー:ホイホイ・MTCC規格モジュール, 工作, 江東電気軌道(KDK) |
コメント(0)
2016年5月11日 5:42 AM | 投稿者名: treasure
ホイホイ基板の製作方法を備忘録的に書いていきます。
実は関東合運までに、100 mmLがひとつ必要です。唯これだけのために資材を購入するのも如何なものですので、ストックしてある廃材を遣り繰りして製作することにしました。

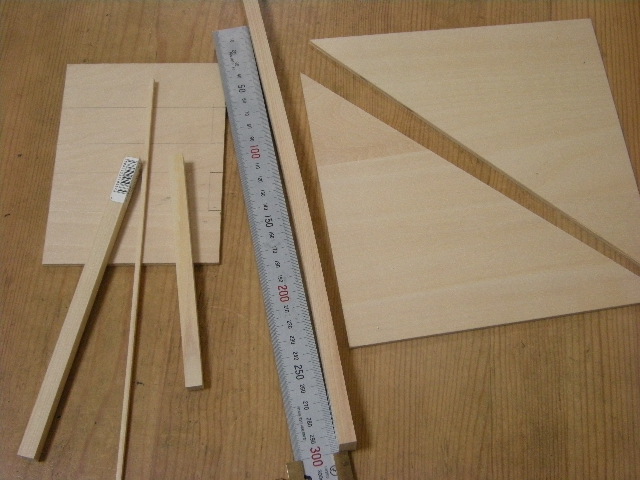
掘り出した廃材です。当初は曲線ホイホイの廃材(斜辺28 cm程の直角二等辺三角形:右側)から100×75 mmの長方形を切り出し、二枚並列に継ぐことを考えていましたが、既に罫書き済みの110×150 mmの4 mm厚べニア板(左側)が出てきましたので、これを利用することにしました。
あとは中央に写っている、変形してしまった10×20 mm角材の未変形部分から92 mm長の縦通材2本、10×10 mm角材の廃材から110 mm長の肋材2本、3×3 mm角材の廃材から100 mm長の縁取り用角材2本を切り出します。この変形した角材、某店でずぅ〰っと売れ残っていた代物でして、必要に迫られて止むを得ず購入したら、直後に新品が補充されました。つまり、在庫なしになるまで発注がかからないんですな…
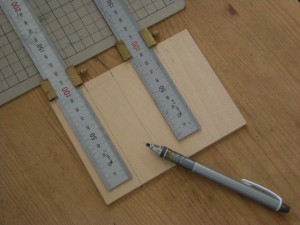
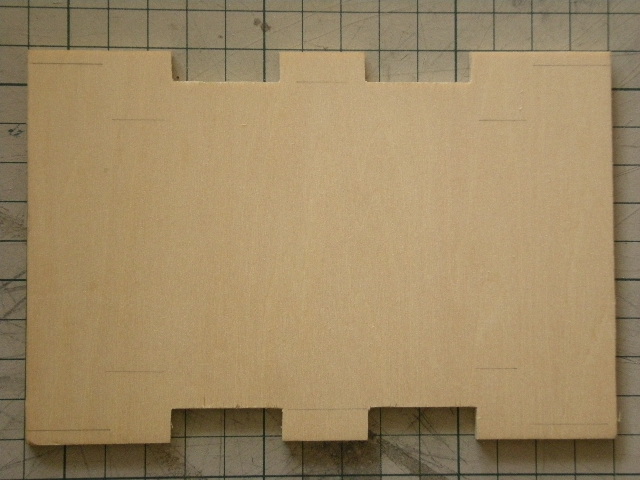
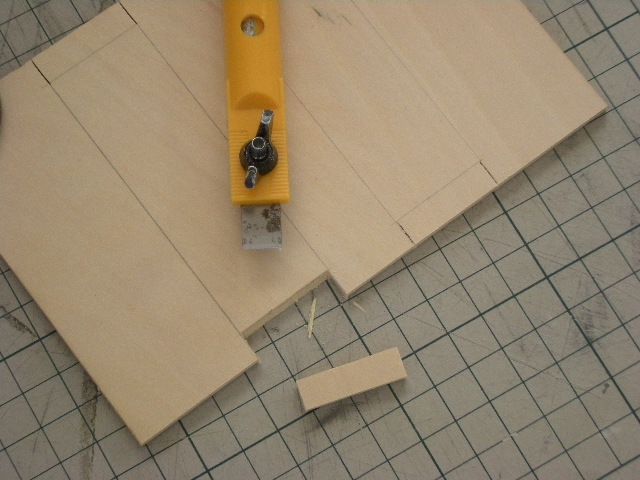
4 mm厚べニア板の長さを100 mmに切り詰めます。ついでに端から8 mmのところに、ユニトラジョイント部収納用の切り欠きのための罫書きを入れます。このような罫書きは、写真のように、予め定めた基準辺からの距離をそれぞれ計算して罫書く必要があります。

大型のカッターナイフで切断しました。4 mm厚べニア板は、表裏両面に切断用の罫書き線を描き、両面からカッターナイフを入れれば簡単に切断できます。
カテゴリー:ホイホイ・MTCC規格モジュール, 工作, 江東電気軌道(KDK) |
コメント(0)
« 古い記事
新しい記事 »